With regards to staying forward of the competitors, good route planning is your secret weapon. In right this moment’s fast-paced atmosphere, environment friendly logistics and streamlined routes aren’t nearly saving money and time – they’re about outpacing your opponents, holding your clients blissful, and in the end rising what you are promoting.
Understanding the Fundamentals:What’s Route Planning?
Route planning is the method of figuring out essentially the most environment friendly path for delivering items or companies to varied places. It considers components like distance, visitors, supply home windows, and gas consumption to optimize routes.
Nonetheless, fundamental route planning is simply the tip of the iceberg. To actually outpace your opponents, you’ll want to elevate your method and embrace smarter techniques.
Tactic 1:Leverage Superior Expertise
The times of manually plotting out routes on a map are lengthy gone. At this time, superior expertise is on the coronary heart of good route planning. Whether or not there’s an sudden visitors jam or a last-minute supply change, real-time monitoring means that you can reroute your automobiles for optimum effectivity.
Synthetic intelligence and machine studying can analyze huge quantities of information to foretell the very best routes. These methods contemplate historic visitors patterns, climate forecasts, and even driver conduct to recommend essentially the most environment friendly paths. The extra knowledge the system processes, the smarter and extra correct it turns into.
Moreover, specialised software program can keep in mind quite a few variables like supply time home windows, automobile capacities, and street restrictions to mechanically generate essentially the most environment friendly routes. These route planning instruments are designed to deal with complicated logistics, making it simpler to handle massive fleets and a number of deliveries.
Tactic 2:Embrace Predictive Analytics
Predictive analytics goes hand-in-hand with expertise however deserves its personal highlight. By analyzing historic knowledge, predictive analytics can forecast potential points earlier than they come up, permitting you to take proactive measures.
Think about realizing prematurely {that a} specific route is vulnerable to heavy visitors on Thursday afternoons or that sure climate situations would possibly decelerate deliveries. Predictive analytics offers these insights, enabling you to plan round potential delays and be sure that your operations run easily.
Moreover, predictive analytics may help you determine patterns and traits in your supply operations. Are there sure areas the place deliveries are constantly late? Is there a recurring subject with a particular automobile? By figuring out these patterns, you possibly can take focused motion to enhance your general effectivity.
Tactic 3:Optimize Your Fleet
Environment friendly route planning isn’t simply in regards to the roads; it’s additionally in regards to the automobiles on them. Your fleet performs a essential position in how properly you possibly can execute your route plans.
Fleet Upkeep – Common upkeep ensures that your automobiles are at all times in high situation, decreasing the danger of breakdowns that may throw a wrench in your schedule.
Car Utilization– It’s not nearly having a fleet; it’s about utilizing it successfully. This implies ensuring that every automobile is absolutely utilized to its capability. Overloading can result in inefficiencies and elevated gas consumption, whereas underloading can imply wasted sources. Good route planning software program may help distribute deliveries evenly throughout your fleet, maximizing effectivity.
Driver Coaching – Even with the very best expertise, your drivers are those on the bottom. Offering them with coaching on environment friendly driving methods—like clean acceleration, sustaining constant speeds, and anticipating visitors circulate—can considerably affect gas consumption and general supply occasions.
Tactic 4:Adapt to Actual-Time Adjustments
Flexibility is vital in good route planning. Even the best-laid plans may be disrupted by sudden occasions. Whether or not it’s an unexpected street closure, a sudden climate change, or a last-minute buyer request, your capacity to adapt rapidly will set you aside from the competitors.
Dynamic Rerouting – Actual-time GPS monitoring mixed with dynamic rerouting capabilities means that you can modify routes on the fly. If a driver encounters a visitors jam or an accident, they are often redirected immediately, minimizing delays.
Buyer Communication – Protecting your clients knowledgeable about potential delays or modifications in supply occasions can enhance their general expertise. Use expertise to offer real-time updates, guaranteeing that clients aren’t left in the dead of night.
Scalability – As what you are promoting grows, so will your supply wants. Good route planning methods needs to be scalable, permitting you to deal with extra deliveries and bigger fleets with out sacrificing effectivity.
Tactic 5:Monitor and Refine Your Technique
Good route planning isn’t a set-it-and-forget-it course of. It requires fixed monitoring and refinement.
Key efficiency indicators (KPIs) like on-time supply charges, gas consumption, and driver productiveness present helpful insights into the effectiveness of your route planning technique.
Often reviewing these metrics may help you determine areas for enchancment and make data-driven choices.
Placing It All Collectively:Outpacing the Competitors
All in all, good route planning is a dynamic and ongoing course of that blends expertise, technique, and adaptableness! Are you able to embrace it?
The 2024 IEEE Worldwide Convention on Robotics and Automation (ICRA) finest paper winners and finalists within the varied completely different classes have been introduced. The recipients had been revealed throughout an award luncheon on the convention, which passed off from 13-17 Could in Yokohama, Japan.
A Movable Microfluidic Chip with Hole Impact for Manipulation of Oocytes, Shuzhang Liang, Satoshi Amaya, Hirotaka Sugiura, Hao Mo, Yuguo Dai, and Fumihito Arai
Beneath Strain: Studying-Based mostly Analog Gauge Studying within the Wild, Maurits Reitsma, Julian Keller, Kenneth Blomqvist, and Roland Siegwart
Environment friendly Composite Studying Robotic Management Beneath Partial Interval Excitation, Tian Shi, Weibing Li, Haoyong Yu, and Yongping Pan
MORALS: Evaluation of Excessive-Dimensional Robotic Controllers through Topological Instruments in a Latent Area, Ewerton Vieira, Aravind Sivaramakrishnan, Sumanth Tangirala, Edgar Granados, Konstantin Mischaikow, and Kostas E. Bekris
IEEE ICRA Finest Paper Award in Cognitive Robotics
NoMaD: Purpose Masked Diffusion Insurance policies for Navigation and Exploration, Ajay Sridhar, Dhruv Shah, Catherine Glossop, and Sergey Levine
Resilient Legged Native Navigation: Studying to Traverse with Compromised Notion Finish-to-Finish, Chong Zhang, Jin Jin, Jonas Frey, Nikita Rudin, Matias Mattamala, Cesar Cadena Lerma, and Marco Hutter
Studying Steady Management with Geometric Regularity from Robotic Intrinsic Symmetry, Shengchao Yan, Baohe Zhang, Yuan Zhang, Joschka Boedecker, and Wolfram Burgard
Studying Imaginative and prescient-Based mostly Bipedal Locomotion for Difficult Terrain, Helei Duan, Bikram Pandit, Mohitvishnu S. Gadde, Bart Jaap Van Marum, Jeremy Dao, Chanho Kim, and Alan Fern
IEEE ICRA Finest Paper Award in Robotic Manipulation
Open X-Embodiment: Robotic Studying Datasets and RT-X Fashions, Sergey Levine, Chelsea Finn, Ken Goldberg, Lawrence Yunliang Chen, Gaurav Sukhatme, Shivin Dass, Lerrel Pinto, Yuke Zhu, Yifeng Zhu, Shuran Music, Oier Mees, Deepak Pathak, Hao-Shu Fang, Henrik Iskov Christensen, Mingyu Ding, Youngwoon Lee, Dorsa Sadigh, Ilija Radosavovic, Jeannette Bohg, Xiaolong Wang, Xuanlin Li, Krishan Rana, Kento Kawaharazuka, Tatsuya Matsushima, Jihoon Oh, Takayuki Osa, Oliver Kroemer, Beomjoon Kim, Edward Johns, Freek Stulp, Jan Schneider, Jiajun Wu, Yunzhu Li, Heni Ben Amor, Lionel Ott, Roberto Martin-Marin, Karol Hausman, Quan Vuong, Pannag Sanketi, Nicolas Heess, Vincent Vanhoucke, Karl Pertsch, Stefan Schaal, Cheng Chi, Chuer Pan, and Alex Bewley
In direction of Generalizable Zero-Shot Manipulation through Translating Human Interplay Plans, Homanga Bharadhwaj, Abhinav Gupta, Vikash Kumar, and Shubham Tulsiani
Listening to Contact: Audio-Visible Pretraining for Contact-Wealthy Manipulation, Jared Mejia, Victoria Dean, Tess Hellebrekers, and Abhinav Gupta
DenseTact-Mini: An Optical Tactile Sensor for Greedy Multi-Scale Objects From Flat Surfaces, Gained Kyung Do, Ankush Ankush Dhawan, Mathilda Kitzmann, and Monroe Kennedy
Constrained Bimanual Planning with Analytic Inverse Kinematics, Thomas Cohn, Seiji Shaw, Max Simchowitz, and Russ Tedrake
IEEE ICRA Finest Paper Award on Human-Robotic Interplay
POLITE: Preferences Mixed with Highlights in Reinforcement Studying, Simon Holk, Daniel Marta, and Iolanda Leite
MateRobot: Materials Recognition in Wearable Robotics for Folks with Visible Impairments, Junwei Zheng, Jiaming Zhang, Kailun Yang, Kunyu Peng, and Rainer Stiefelhagen
Robotic-Assisted Navigation for Visually Impaired via Adaptive Impedance and Path Planning, Pietro Balatti, Idil Ozdamar, Doganay Sirintuna, Luca Fortini, Mattia Leonori, Juan M. Gandarias, and Arash Ajoudani
Incremental Studying of Full-Pose Through-Level Motion Primitives on Riemannian Manifolds, Tilman Daab, Noémie Jaquier, Christian R. G. Dreher, Andre Meixner, Franziska Krebs, and Tamim Asfour
Supernumerary Robotic Limbs to Assist Submit-Fall Recoveries for Astronauts, Erik Ballesteros, Sang-Yoep Lee, Kalind Carpenter, and Harry Asada
Intraoperatively Iterative Hough Remodel Based mostly In-plane Hybrid Management of Arterial Robotic Ultrasound for Magnetic Catheterization, Zhengyang Li, Magejiang Yeerbulati, and Qingsong Xu
Environment friendly Mannequin Studying and Adaptive Monitoring Management of Magnetic Micro-Robots for Non-Contact Manipulation, Yongyi Jia, Shu Miao, Junjian Zhou, Niandong Jiao, Lianqing Liu, and Xiang Li
Colibri5: Actual-Time Monocular 5-DoF Trocar Pose Monitoring for Robotic-Assisted Vitreoretinal Surgical procedure, Shervin Dehghani, Michael Sommersperger, Mahdi Saleh, Alireza Alikhani, Benjamin Busam, Peter Gehlbach, Ioan Iulian Iordachita, Nassir Navab, and M. Ali Nasseri
Hybrid Volitional Management of a Robotic Transtibial Prosthesis utilizing a Part Variable Impedance Controller, Ryan Posh, Jonathan Allen Tittle, David Kelly, James Schmiedeler, and Patrick M. Wensing
Design and Implementation of a Robotized Hand-held Dissector for Endoscopic Pulmonary Endarterectomy, Runfeng Zhu, Xilong Hou, Wei Huang, Lei Du, Zhong Wu, Hongbin Liu, Henry Chu, and Qing Xiang Zhao
IEEE ICRA Finest Paper Award on Mechanisms and Design
Winner
Design and Modeling of a Nested Bi-cavity-based Tender Rising Robotic for Greedy in Constrained Environments, Haochen Yong, Fukang Xu, Chenfei Li, Han Ding, and Zhigang Wu
Finalists
Optimized Design and Fabrication of Skeletal Muscle Actuators for Bio-syncretic Robots, Lianchao Yang, Chuang Zhang, Ruiqian Wang, Yiwei Zhang, and Lianqing Liu
Lissajous Curve-Based mostly Vibrational Orbit Management of a Versatile Vibrational Actuator with a Structural Anisotropy, Yuto Miyazaki and Mitsuru Higashimori
Dynamic Modeling of Wing-Assisted Inclined Operating with a Morphing Multi-Modal Robotic, Eric Sihite, Alireza Ramezani, and Gharib Morteza
IEEE ICRA Finest Paper Award on Multi-Robotic Programs
Observer-based Distributed MPC for Collaborative Quadrotor-Quadruped Manipulation of a Cable-Towed Load, Shaohang Xu, Yi’An Wang, Wentao Zhang, Chin Pang Ho, and Lijun Zhu
Studying for Dynamic Subteaming and Voluntary Ready in Heterogeneous Multi-Robotic Collaborative Scheduling, Williard Joshua Jose and Hao Zhang
Asynchronous Distributed Smoothing and Mapping through On-Manifold Consensus ADMM, Daniel Mcgann, Kyle Lassak, and Michael Kaess
Uncertainty-Bounded Lively Monitoring of Unknown Dynamic Targets in Street-Networks with Minimal Fleet, Shuaikang Wang, Yiannis Kantaros, and Meng Guo
Censible: A Sturdy and Sensible International Localization Framework for Planetary Floor Missions, Jeremy Nash, Quintin Dwight, Lucas Saldyt, Haoda Wang, Steven Myint, Adnan Ansar, and Vandi Verma
Environment friendly and Correct Transformer-Based mostly 3D Form Completion and Reconstruction of Fruits for Agricultural Robots, Federico Magistri, Rodrigo Marcuzzi, Elias Ariel Marks, Matteo Sodano, Jens Behley, and Cyrill Stachniss
CoPAL: Corrective Planning of Robotic Actions with Massive Language Fashions, Frank Joublin, Antonello Ceravola, Pavel Smirnov, Felix Ocker, Joerg Deigmoeller, Anna Belardinelli, Chao Wang, Stephan Hasler, Daniel Tanneberg, and Michael Gienger
CalliRewrite: Recovering Handwriting Behaviors from Calligraphy Photographs with out Supervision, Yuxuan Luo, Zekun Wu, and Zhouhui Lian
IEEE ICRA Finest Paper Award in Robotic Imaginative and prescient
HEGN: Hierarchical Equivariant Graph Neural Community for 9DoF Level Cloud Registration, Adam Misik, Driton Salihu, Xin Su, Heike Brock, and Eckehard Steinbach
Deep Evidential Uncertainty Estimation for Semantic Segmentation beneath Out-Of-Distribution Obstacles, Siddharth Ancha, Philip Osteen, and Nicholas Roy
SeqTrack3D: Exploring Sequence Info for Sturdy 3D Level Cloud Monitoring, Yu Lin, Zhiheng Li, Yubo Cui, and Zheng Fang
A Trajectory-based Flight Assistive System for Novice Pilots in Drone Racing Situation, Yuhang Zhong, Guangyu Zhao, Qianhao Wang, Guangtong Xu, Chao Xu, and Fei Gao
Co-Design Optimisation of Morphing Topology and Management of Winged Drones, Fabio Bergonti, Gabriele Nava, Valentin Wüest, Antonello Paolino, Giuseppe L’Erario, Daniele Pucci, and Dario Floreano
FC-Planner: A Skeleton-guided Planning Framework for Quick Aerial Protection of Complicated 3D Scenes, Chen Feng, Haojia Li, Mingjie Zhang, Xinyi Chen, Boyu Zhou, and Shaojie Shen
Sequential Trajectory Optimization for Externally-Actuated Modular Manipulators with Joint Locking, Jaeu Choe, Jeongseob Lee, Hyunsoo Yang, Hai-Nguyen (Hann) Nguyen, and Dongjun Lee
Spatial Assisted Human-Drone Collaborative Navigation and Interplay via Immersive Combined Actuality, Luca Morando and Giuseppe Loianno
IEEE ICRA Finest Scholar Paper Award
Winner
Optimized Design and Fabrication of Skeletal Muscle Actuators for Bio-syncretic Robots, Lianchao Yang, Chuang Zhang, Ruiqian Wang, Yiwei Zhang, and Lianqing Liu
Finalists
TinyMPC: Mannequin-Predictive Management on Useful resource-Constrained Microcontrollers, Anoushka Alavilli, Khai Nguyen, Samuel Schoedel, Brian Plancher, and Zachary Manchester
Purpose Masked Diffusion Insurance policies for Unified Navigation and Exploration, Ajay Sridhar, Dhruv Shah, Catherine Glossop, and Sergey Levine
Open X-Embodiment: Robotic Studying Datasets and RT-X Fashions, Sergey Levine, Chelsea Finn, Ken Goldberg, Lawrence Yunliang Chen, Gaurav Sukhatme, Shivin Dass, Lerrel Pinto, Yuke Zhu, Yifeng Zhu, Shuran Music, Oier Mees, Deepak Pathak, Hao-Shu Fang, Henrik Iskov Christensen, Mingyu Ding, Youngwoon Lee, Dorsa Sadigh, Ilija Radosavovic, Jeannette Bohg, Xiaolong Wang, Xuanlin Li, Krishan Rana, Kento Kawaharazuka, Tatsuya Matsushima, Jihoon Oh, Takayuki Osa, Oliver Kroemer, Beomjoon Kim, Edward Johns, Freek Stulp, Jan Schneider, Jiajun Wu, Yunzhu Li, Heni Ben Amor, Lionel Ott, Roberto Martin-Martin, Karol Hausman, Quan Vuong, Pannag Sanketi, Nicolas Heess, Vincent Vanhoucke, Karl Pertsch, Stefan Schaal, Cheng Chi, Chuer Pan, and Alex Bewley
POLITE: Preferences Mixed with Highlights in Reinforcement Studying, Simon Holk, Daniel Marta, and Iolanda Leite
Exoskeleton-Mediated Bodily Human-Human Interplay for a Sit-to-Stand Rehabilitation Activity, Lorenzo Vianello, Emek Baris Kucuktabak, Matthew Brief, Clément Lhoste, Lorenzo Amato, Kevin Lynch, and Jose L. Pons
Design and Modeling of a Nested Bi-cavity- primarily based Tender Rising Robotic for Greedy in Constrained Environments, Haochen Yong, Fukang Xu, Chenfei Li, Han Ding, and Zhigang Wu
Observer-based Distributed MPC for Collaborative Quadrotor-Quadruped Manipulation of a Cable-Towed Load, Shaohang Xu, Yi’An Wang, Wentao Zhang, Chin Pang Ho, and Lijun Zhu
Censible: A Sturdy and Sensible International Localization Framework for Planetary Floor Missions, Jeremy Nash, Quintin Dwight, Lucas Saldyt, Haoda Wang, Steven Myint, Adnan Ansar, and Vandi Verma
HEGN: Hierarchical Equivariant Graph Neural Community for 9DoF Level Cloud Registration, Adam Misik, Driton Salihu, Xin Su, Heike Brock, and Eckehard Steinbach
A Trajectory-based Flight Assistive System for Novice Pilots in Drone Racing Situation, Yuhang Zhong, Guangyu Zhao, Qianhao Wang, Guangtong Xu, Chao Xu, and Fei Gao
IEEE ICRA Finest Convention Paper Award
Winners
Purpose Masked Diffusion Insurance policies for Unified Navigation and Exploration, Ajay Sridhar, Dhruv Shah, Catherine Glossop, and Sergey Levine
Open X-Embodiment: Robotic Studying Datasets and RT-X, Sergey Levine, Chelsea Finn, Ken Goldberg, Lawrence Yunliang Chen, Gaurav Sukhatme, Shivin Dass, Lerrel Pinto, Yuke Zhu, Yifeng Zhu, Shuran Music, Oier Mees, Deepak Pathak, Hao-Shu Fang, Henrik Iskov Christensen, Mingyu Ding, Youngwoon Lee, Dorsa Sadigh, Ilija Radosavovic, Jeannette Bohg, Xiaolong Wang, Xuanlin Li, Krishan Rana, Kento Kawaharazuka, Tatsuya Matsushima, Jihoon Oh, Takayuki Osa, Oliver Kroemer, Beomjoon Kim, Edward Johns, Freek Stulp, Jan Schneider, Jiajun Wu, Yunzhu Li, Heni Ben Amor, Lionel Ott, Roberto Martin-Martin, Karol Hausman, Quan Vuong, Pannag Sanketi, Nicolas Heess, Vincent Vanhoucke, Karl Pertsch, Stefan Schaal, Cheng Chi, Chuer Pan, and Alex Bewley
Finalists
TinyMPC: Mannequin-Predictive Management on Useful resource-Constrained Microcontrollers, Anoushka Alavilli, Khai Nguyen, Samuel Schoedel, Brian Plancher, and Zachary Manchester
POLITE: Preferences Mixed with Highlights in Reinforcement Studying, Simon Holk, Daniel Marta, and Iolanda Leite
Exoskeleton-Mediated Bodily Human-Human Interplay for a Sit-to-Stand Rehabilitation Activity, Lorenzo Vianello, Emek Baris Kucuktabak, Matthew Brief, Clément Lhoste, Lorenzo Amato, Kevin Lynch, and Jose L. Pons
Optimized Design and Fabrication of Skeletal Muscle Actuators for Bio-syncretic Robots, Lianchao Yang, Chuang Zhang, Ruiqian Wang, Yiwei Zhang, and Lianqing Liu
Design and Modeling of a Nested Bi-cavity- primarily based Tender Rising Robotic for Greedy in Constrained Environments, Haochen Yong, Fukang Xu, Chenfei Li, Han Ding, and Zhigang Wu
Observer-based Distributed MPC for Collaborative Quadrotor-Quadruped Manipulation of a Cable-Towed Load, Shaohang Xu, Yi’An Wang, Wentao Zhang, Chin Pang Ho, and Lijun Zhu
Censible: A Sturdy and Sensible International Localization Framework for Planetary Floor Missions, Jeremy Nash, Quintin Dwight, Lucas Saldyt, Haoda Wang, Steven Myint, Adnan Ansar, and Vandi Verma
HEGN: Hierarchical Equivariant Graph Neural Community for 9DoF Level Cloud Registration, Adam Misik, Driton Salihu, Xin Su, Heike Brock, and Eckehard Steinbach
A Trajectory-based Flight Assistive System for Novice Pilots in Drone Racing Situation, Yuhang Zhong, Guangyu Zhao, Qianhao Wang, Guangtong Xu, Chao Xu, and Fei Gao
AIhub
is a non-profit devoted to connecting the AI group to the general public by offering free, high-quality info in AI.
AIhub
is a non-profit devoted to connecting the AI group to the general public by offering free, high-quality info in AI.
Tesla was based on the first of July in 2003 by a gaggle of engineers based mostly in San Carlos, California.
They launched their first electrical automotive 5 years later in 2008 – the Roadster.
Since then, they’ve gone on to design the world’s first-ever premium all-electric sedan, the Mannequin S, together with many extra mind-boggling electrical automobiles that each one use the identical cutting-edge battery know-how Tesla has turn out to be so well-known for.
Distinctive visible design apart, chances are you’ll be asking your self…
How precisely do Tesla automobiles work?
Tesla automobiles, additionally known as Electrical Automobiles (EVs), make use of an electrical motor in lieu of an inner combustion engine. These cars are powered by a considerable traction battery pack that provides power to the electrical motor. By counting on electrical energy, Tesla automobiles circumvent the manufacturing of exhaust emissions and remove the standard liquid gasoline elements, together with gasoline strains, gasoline pumps, and gasoline tanks.
On this article, we intention to dissect a Tesla automotive and clarify how every element works intimately.
Foreword
Climatebiz specialists design, analysis, fact-check & edit all work meticulously.
Affiliate Disclaimer
Climatebiz is reader-supported. We might earn an affiliate fee while you purchase by way of hyperlinks on our website.
How Do Tesla Automobiles Work?
Induction Motor
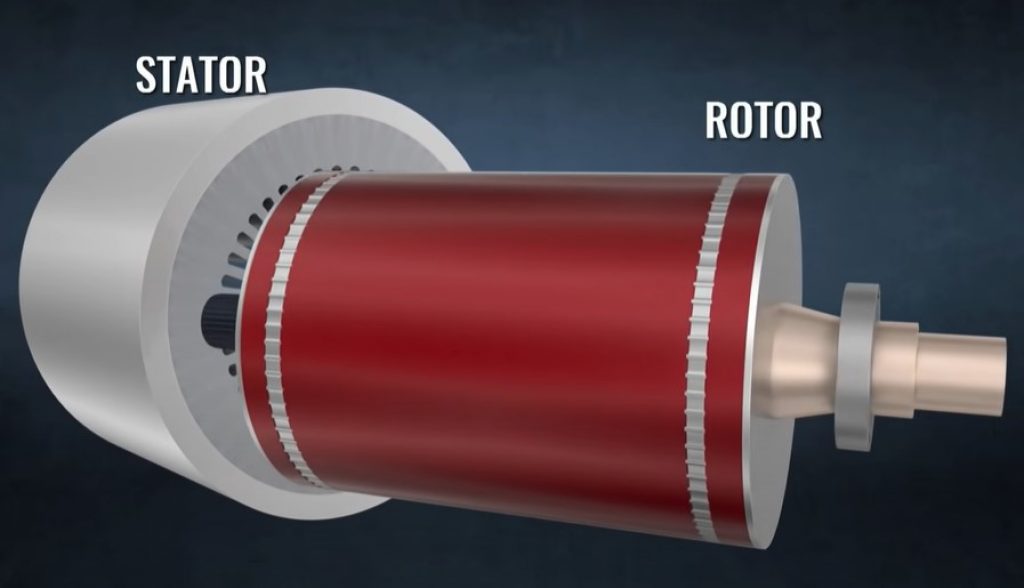
The primary induction motor was invented by Nikola Tesla round 100 years in the past. It has two major components, the stator and the rotor.
The rotor is just a group of conducting bars short-circuited by finish rings. A 3-phase AC energy output is given to the stator.
The three-phase AC within the coils produces a magnetic area. Tesla motors produce a four-pole magnetic area.
This rotating magnetic area induces a present on the rotor bars to make them flip. In an induction motor, the rotor often lags behind the rotor velocity (RMF velocity)
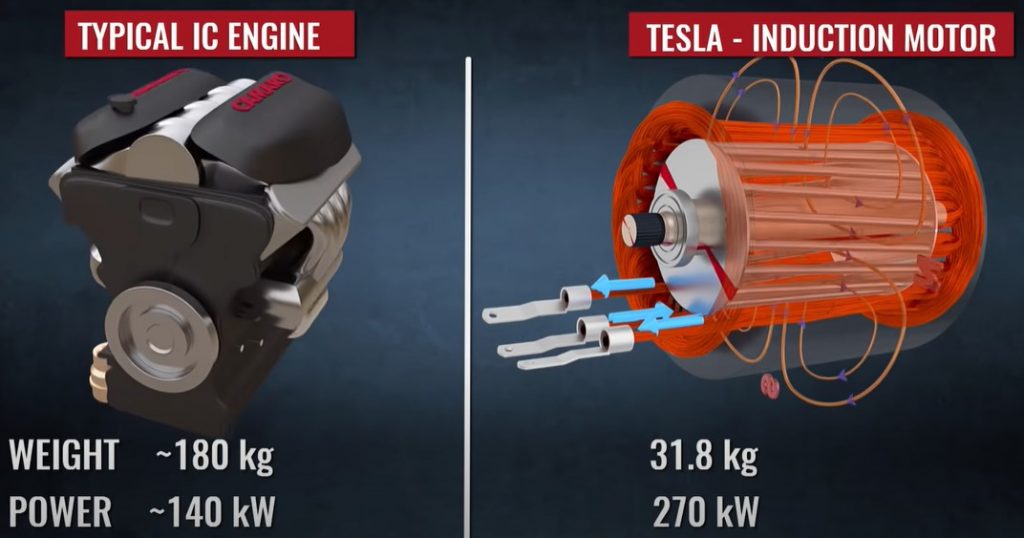
An induction motor has neither brushes nor a everlasting magnet but stays very highly effective.
The beauty of induction motors is that the rotation velocity relies on the frequency of the AC energy provide.
This implies the velocity at which the wheel turns might be altered by merely various the frequency of the facility provide.
This truth makes velocity management on a Tesla simple and dependable. The truth is, a Tesla motor can vary from 0 to 18,000 RPM.
Inverter
The battery pack is what provides the induction motor with energy.
Nonetheless, it produces DC energy, which means earlier than the availability can get to the motor, it needs to be transformed from DC to AC energy.
That is the place the inverter comes into play.
Not solely does the invert convert DC to AC, it additionally controls the AC energy frequency, thus controlling the motor velocity.
The inverter may even shift the amplitude of the AC motor, which in flip controls the motor output energy. Basically, the inverter acts because the mind of the electrical automotive.
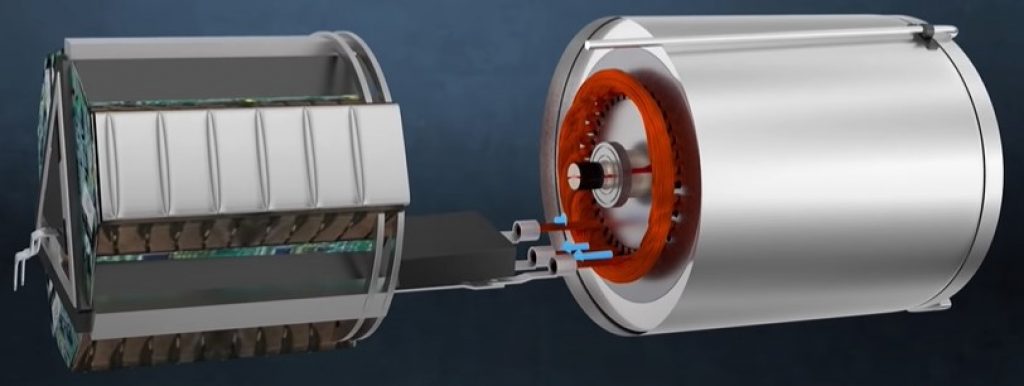
Battery Pack
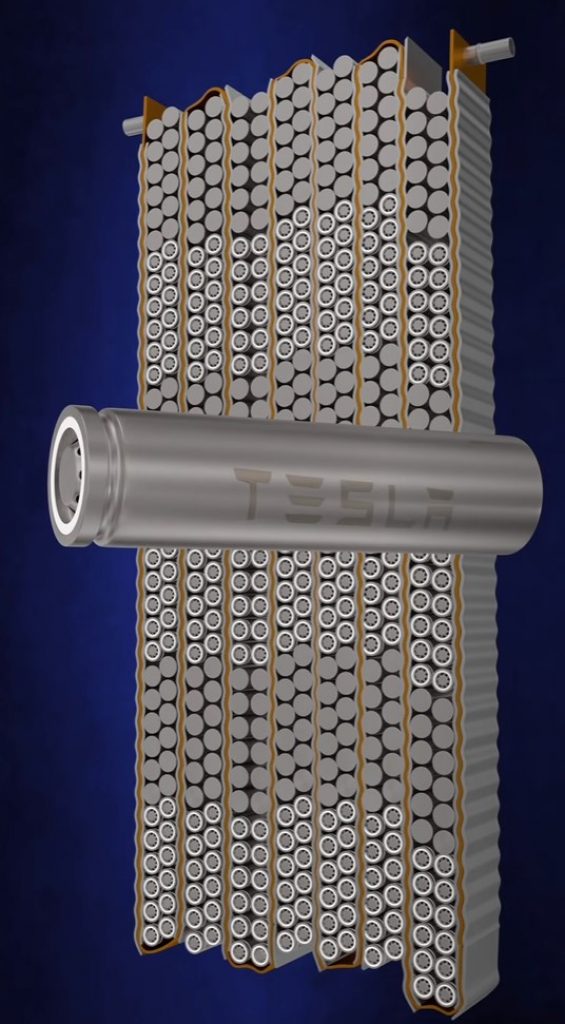
This will likely come as a shock to most, however the battery packs include huge collections of widespread lithium-ion battery cells, much like these utilized in your on a regular basis life.
All these cells are interconnected in a mixture of collection and parallel to provide the required energy to run the electrical automotive.
Glycol coolant is handed by way of metallic interior tubes that intertwine by way of the small gaps between the cells. That is one precept that units Tesla aside from different electrical automotive producers.
Through the use of many small cells as an alternative of some huge cells, important cooling is assured. This reduces thermal scorching spots, which produce even temperature distribution among the many many cells – resulting in increased battery pack life.
All these cells are organized in removable modules, resulting in about 16 of those modules, which embody round 7000 cells.
Do Tesla Automobiles Break Down Typically?
Simply how dependable are Tesla automobiles?
Scientific analysis has demonstrated that the Tesla Mannequin S can stay operational even after overlaying a distance of over 400,000 miles (equal to 643,737 km) and displays rare breakdowns. The explanation behind this excellent sturdiness lies within the electrical car’s reliance on fewer mechanical elements. With fewer transferring components, the chance of malfunctioning is considerably lowered.
In relation to fuel-powered automobiles, one of many major causes of a breakdown is a defective battery.
Now, what a couple of Tesla automotive that depends on hundreds of battery cells with a view to work?
Properly, Tesla as an organization has not been gathering knowledge lengthy sufficient to reply this query precisely for all of their automobiles (particularly the newer Mannequin 3 and Mannequin Y).
Nonetheless, we do have fairly just a few years of knowledge for his or her barely older fashions, just like the Mannequin S and Mannequin X.
Beneath we’ve got created two tables breaking down every mannequin’s battery capabilities:
Mannequin S & X
Information
Common Degradation Price Per 100,000 Miles
4%
Miles Earlier than 20% Degradation
500,000
Years Earlier than 20% Degradation
15+
Charging Cycles
1,000
Mannequin 3 & Y
Information
Common Degradation Price Per 100,000 Miles
4%
Miles Earlier than 20% Degradation
400,000
Years Earlier than 20% Degradation
10-15
Charging Cycles
1500
The above knowledge are broad estimates. Clearly, the battery retention capacities will range from driver to driver relying on particular person driving habits, driving temperature, and quick charging frequency.
What Breaks The Most On Tesla Automobiles?
Based mostly on trade knowledge and person stories, the commonest issues to interrupt on a Tesla are:
Suspension elements
Brake pads
That is seemingly attributed to the inherent weight of electrical automobiles, which tends to be larger than their inner combustion engine counterparts and locations extra important stress on the car’s suspension and braking programs.
With that being mentioned, Tesla continues to refine and enhance the design of its automobiles, leading to longer-lasting elements and fewer required repairs.
Is A Tesla Automobile Costly To Keep?
Beneath we’ve got collected and put collectively knowledge from Tesloop, which has stored a report of its Tesla Mannequin S upkeep bills over a interval of 450,000 miles.
Within the desk, we’ll deal with the next:
RSM – Common scheduled upkeep
GVR – Normal car repairs
Beneath is a abstract of the tables:
Price to Keep aTesla Mannequin S (Over 450,000 miles)
RSM: $12,782 GVR: $14,823 Complete: $27,604 ($0,07 per mile)
Beneath you will see that the entire breakdown of prices, organized right into a desk:
Common Scheduled Maintanence (RSM)
Mileage
Cost Sort
Price
Tire Alternative
51,000
Buyer Pay
$194
Wheel Alignment
74,469
Buyer Pay
$200
Tire Alternative
75,135
Buyer Pay
$513
Tire Alternative
95,242
Buyer Pay
$388
Tire Inspection
101,303
Goodwill
$0
Tire Inspection
111,609
Goodwill
$0
Tire Alternative
126,419
Buyer Pay
$389
Rear Bumper Repairs
N/A
Buyer Pay
$1,000
Tire Inspection
130,404
Goodwill
$0
Tire Inspection
147,329
Goodwill
$0
Tire Alternative
159,648
Buyer Pay
$389
Wheel Alignment
160,000
Goodwill
$0
Tire Inspection
168,014
Goodwill
$0
Tire Inspection
174,787
Goodwill
$0
Tire Inspection
181,418
Goodwill
$0
Tire Inspection
191,123
Goodwill
$0
12v Battery Alternative
194,237
Buyer Pay
$171
Tire Inspection
210,235
Goodwill
$0
Tire Inspection
218,689
Goodwill
$0
Substitute – Entrance/Rear Brake Pads/Rotors
225,351
Buyer Pay
$1,759
Tire Alternative
231,546
Buyer Pay
$334
Wheel Alignment
231,570
Buyer Pay
$0
Changed Headlights
251,252
Buyer Pay
$2,800
Tire Inspection
255,345
Goodwill
$0
Tire Inspection
265,408
Goodwill
$0
Normal Upkeep
274,610
Buyer Pay
$2,176
Tire Inspection
276,984
Goodwill
$0
Wheel Alignment
278,732
Goodwill
$0
Tire Alternative
278,735
Buyer Pay
$666
Sprint Panel Replacements
290,263
Goodwill
$0
Automobile Inspection
290,461
Goodwill
$0
Tire Inspection
296,168
Goodwill
$0
Tire Inspection
305,181
Goodwill
$0
Key Fob Options Turned On
325,271
Goodwill
$0
12V Energy Outlet Alternative
325,271
Goodwill
$0
Automobile Inspection
351,816
Goodwill
$0
Tire Inspection
351,816
Goodwill
$0
Tire Alternative
362,821
Buyer Pay
$362
Tire Inspection
375,145
Goodwill
$0
Brake Test
377,785
Goodwill
$0
Rear Suspension Test
377,785
Goodwill
$0
Tire Restore
380,058
Goodwill
$0
Tire Alternative
N/A
Buyer Pay
$100
Tire Alternative
386,025
Buyer Pay
$781
Wheel Alignment
392,403
Goodwill
$0
Tire Alternative
430,400
Buyer Pay
$560
Complete RSM
$12,782
Normal Automobile Repairs (GVR)
Mileage
Cost Sort
Price
Steering Column Management Module
17,441
Guarantee
$0
nav/supercharging/AP analysis
17,441
Guarantee
$0
Entrance Drive Unit
36,404
Guarantee
$0
Ahead Going through Digicam – Drive Cycle Calibration
36,404
Guarantee
$0
Calibrate Sunroof
36,404
Guarantee
$0
Driver Door Deal with Meeting Repair
36,404
Guarantee
$0
Excessive Voltage Battery Alternative
194,237
Guarantee
$0
Cabin HVAC Fan basic Analysis
215,668
Guarantee
$0
Substitute Rear Proper Door Deal with
230,690
Buyer Pay
$962
Driver Door Deal with Meeting Repair
235,907
Buyer Pay
$962
New Key Fob
274,019
Buyer Pay
$123
Entrance Left Door Deal with
278,732
Buyer Pay
$221
Substitute Thermal Controller (Air Conditioning)
279,127
Goodwill
$0
Substitute AC TXV Valve Evaporator
278,732
Buyer Pay
$436
Air Conditioning
290,263
Buyer Pay
$1,351
Windshield/Window Restore
N/A
Buyer Pay
$139
Key Fob Alternative
306,072
Buyer Pay
$141
Door Handles
310,230
Buyer Pay
$749
RR Rocket Panel Re-Connected
310,230
Goodwill
$0
Excessive Voltage Battery Alternative
324,044
Guarantee
$0
Additonal Key Fob Alternative
325,271
Buyer Pay
$124
Windshield/Window Restore
N/A
Buyer Pay
$153
Changed drivers seat base meeting
377,785
Buyer Pay
$1,364
Eliminated bumper and secured parking sensors
377,785
Goodwill
$0
AC Actuator
396,877
Buyer Pay
$318
Rear Stabilizer Bar
406,304
Buyer Pay
$161
Fore hyperlink assy, RH
406,304
Buyer Pay
$185
FR SUSP AFT hyperlink assy
406,304
Buyer Pay
$240
MS RR decrease management arm assy-rwk
406,304
Buyer Pay
$319
FR UPR CTRL Arm, RH, Twin motor
406,304
Buyer Pay
$260
FR hyperlink assy, LH
406,304
Buyer Pay
$185
Rear toe hyperlink, x-axis
406,304
Buyer Pay
$72
RR SUSP higher hyperlink assy, X-axis
406,304
Buyer Pay
$210
Labor & Miscellaneous
406,304
Buyer Pay
$3,500
ASY Liftgate Latch PWR REL
430,398
Buyer Pay
$39
Actuator Cinching
430,398
Buyer Pay
$64
Cable, Cinch Liftgate
430,398
Buyer Pay
$64
Labor & Miscellaneous
430,398
Buyer Pay
$280
Left Headlight & Broken Undercarriage Changed
446,997
Buyer Pay
$2,202.08
Complete GVR
$14,823
Complete RSM
$12,782
Complete Price
$27,604
Price/Mile
$0.07
MSRP Gasoline Prices, 2.5 miles/kw, @ $0.26/kw for 450,000 Miles
$46,800.00
Disclaimer: This car is grandfathered in with free supercharging for all times.
Totally Loaded Prices
$74,404
FLC/Mile
$0.19
The place Can You Purchase Tesla Automobiles?
Teslas are at the moment offered within the following nations:
North America
United States
Canada
Mexico
Puerto Rico
Europe
Belgium
Hungary
Czechia
Netherlands
Denmark
Norway
Austria
Germany
Poland
Estonia
Portugal
Greece
Romania
Spain
Slovakia
France
Croatia
Eire
Slovenia
Switzerland
Iceland
Sweden
Italy
Finland
Luxemburg
United Kingdom
Center East
United Arab Emirates
Israel
Asia/Pacific
Singapore
South Korea
China
Japan
Hong Kong
Taiwan
Australia
Macau
New Zealand
FAQs
How lengthy does it take to cost a Tesla car?
The time it takes to cost a Tesla car relies on the mannequin of the car, the battery’s state of cost, and the kind of charger getting used.
Utilizing a Tesla Supercharger, most Tesla automobiles can obtain an 80% cost in roughly half-hour. Nonetheless, utilizing a regular residence charger, it might take a number of hours to realize a full cost.
Can Tesla automobiles be charged utilizing any electrical car (EV) charging station?
Tesla automobiles include a proprietary charging port, however they are often charged at most public EV charging stations utilizing an adapter.
Tesla gives adapters for varied kinds of charging connectors, permitting house owners to make use of non-Tesla charging stations when wanted.
Are Tesla automobiles outfitted with regenerative braking programs, and the way do they work?
Sure, Tesla automobiles are outfitted with regenerative braking programs. Regenerative braking permits the car to transform kinetic power again into saved power within the car’s battery at any time when the motive force applies the brakes or lifts off the accelerator.
This course of helps in enhancing the general effectivity of the car and extends the driving vary by replenishing the battery.
How does the Autopilot characteristic in Tesla automobiles perform?
Tesla’s Autopilot is a sophisticated driver-assistance system using varied sensors, cameras, and machine-learning algorithms to allow the automotive to semi-automatically steer, speed up, and brake.
It may navigate by way of visitors, change lanes, and park itself below sure situations, nevertheless it requires lively supervision from the motive force, who should preserve their arms on the steering wheel and be able to take management at any time.
Can the battery in a Tesla automotive get replaced, and what’s the approximate value?
Sure, the battery in a Tesla automotive might be changed. Nonetheless, the price of changing a Tesla battery might be fairly excessive, doubtlessly starting from $5,000 to $20,000 or extra, relying on the mannequin and the battery sort.
Nonetheless, it’s necessary to notice that Tesla batteries are designed to final for a really very long time, and many house owners might by no means want to exchange them.
What’s the guarantee interval offered by Tesla for his or her automobiles, particularly regarding the battery and the powertrain?
Tesla gives completely different guarantee intervals for various car elements. The battery and drive unit guarantee for the Tesla Mannequin S and Mannequin X is 8 years, with no restrict on the variety of miles pushed.
For the Mannequin 3 and Mannequin Y Normal Vary Plus and Normal Vary variations, the guarantee can be 8 years however is restricted to 100,000 miles, and for Lengthy Vary and Efficiency variations, it’s 8 years or 120,000 miles, whichever comes first.
Different elements usually have a restricted guarantee of 4 years or 50,000 miles. Clients are suggested to test the most recent guarantee phrases whereas buying.
Remaining Ideas
The market share of electrical automobiles, together with Tesla’s, has soared from a mere 0.7% to 2.4% of all automobiles offered within the US in 2020, a outstanding improve over the previous 5 years.
In line with latest research, this determine is anticipated to develop to 11% by 2025, with projections indicating that over a 3rd of all automobiles offered within the US will likely be electrical by 2030.
For these taken with buying a Tesla, please go to the official Tesla web site to position your order.
When you begin migrating to the Swift 6 language mode, you will probably activate strict concurrency first. As soon as you’ve got executed this there can be a number of warings and errors that you will encounter and these errors might be complicated at occasions.
I will begin by saying that having a strong understanding of actors, sendable, and knowledge races is a big benefit while you wish to undertake the Swift 6 language mode. Just about all the warnings you will get in strict concurrency mode will inform you about potential points associated to operating code concurrently. For an in-depth understanding of actors, sendability and knowledge races I extremely advocate that you simply check out my Swift Concurrency course which can get you entry to a collection of movies, workouts, and my Sensible Swift Concurrency ebook with a single buy.
WIth that out of the best way, let’s check out the next warning that you simply would possibly encounter in your mission:
Seize of non-sendable sort in @Sendable closure
This warning tells us that we’re capturing and utilizing a property inside a closure. This closure is marked as @Sendable which implies that we should always count on this closure to run in a concurrent setting. The Swift compiler warns us that, as a result of this closure will run concurrently, we should always be sure that any properties that we seize inside this closure can safely be used from concurrent code.
In different phrases, the compiler is telling us that we’re risking crashes as a result of we’re passing an object that may’t be used from a number of duties to a closure that we should always count on to be run from a number of duties. Or at the very least we should always count on our closure to be transferred from one activity to a different.
In fact, there is not any ensures that our code will crash. Neither is it assured that our closure can be run from a number of locations on the similar time. What issues right here is that the closure is marked as @Sendable which tells us that we should always be sure that something that is captured inside the closure can be Sendable.
An instance of the place this warning would possibly happen might appear like this:
func run(accomplished: @escaping TaskCompletion) {
guard !metaData.isFinished else {
DispatchQueue.primary.async {
// Seize of 'accomplished' with non-sendable sort 'TaskCompletion' (aka '(End result, any Error>) -> ()') in a `@Sendable` closure; that is an error within the Swift 6 language mode
// Sending 'accomplished' dangers inflicting knowledge races; that is an error within the Swift 6 language mode
accomplished(.failure(TUSClientError.uploadIsAlreadyFinished))
}
return
}
// ...
}
The compiler is telling us that the accomplished closure that we’re receiving within the run perform cannot be handed toDispatchQueue.primary.async safely. The explanation for that is that the run perform is assumed to be run in a single isolation context, and the closure handed to DispatchQueue.primary.async will run in one other isolation context. Or, in different phrases, run and DispatchQueue.primary.async would possibly run as a part of completely different duties or as a part of completely different actors.
To repair this, we’d like. to be sure that our TaskCompletion closure is @Sendable so the compiler is aware of that we are able to safely move that closure throughout concurrency boundaries:
In most apps, a repair like it will introduce new warnings of the identical variety. The explanation for that is that as a result of the TaskCompletion closure is now @Sendable, the compiler goes to be sure that each closure handed to our run perform would not captuire any non-sendable varieties.
For instance, one of many locations the place I name this run perform would possibly appear like this:
activity.run { [weak self] end in
// Seize of 'self' with non-sendable sort 'Scheduler?' in a `@Sendable` closure; that is an error within the Swift 6 language mode
guard let self = self else { return }
// ...
}
As a result of the closure handed to activity.run must be @Sendable any captured varieties additionally must be made Sendable.
At this level you will usually discover that your refactor is snowballing into one thing a lot larger.
On this case, I have to make Scheduler conform to Sendable and there is two methods for me to try this:
Conform Scheduler to Sendable
Make Scheduler into an actor
The second choice is probably the best choice. Making Scheduler an actor would permit me to have mutable state with out knowledge races on account of actor isolation. Making the Scheduler conform to Sendable with out making it an actor would imply that I’ve to do away with all mutable state since lessons with mutable state cannot be made Sendable.
Utilizing an actor would imply that I can not instantly entry a variety of the state and capabilities on that actor. It would be required to start out awaiting entry which implies that a variety of my code has to develop into async and wrapped in Activity objects. The refactor would get uncontrolled actual quick that means.
To restrict the scope of my refactor it is smart to introduce a 3rd, short-term choice:
Conform Scheduler to Sendable utilizing the unchecked attribute
For this particular case I take note of, I do know that Scheduler was written to be thread-safe. Because of this it’s very secure to work with Scheduler from a number of duties, threads, and queues. Nevertheless, this security was carried out utilizing outdated mechanisms like DispatchQueue. In consequence, the compiler will not simply settle for my declare that Scheduler is Sendable.
By making use of @unchecked Sendable on this class the compiler will settle for that Scheduler is Sendable and I can proceed my refactor.
As soon as I am able to convert Scheduler to an actor I can take away the @unchecked Sendable, change my class to an actor and proceed updating my code and resolving warnings. That is nice as a result of it means I haven’t got to leap down rabbit gap after rabbit gap which might end in a refactor that will get means out of hand and turns into nearly not possible to handle appropriately.
If you’re on macOS and utilizing Homebrew, you’ll be able to set up sttr with the next:
brew faucet abhimanyu003/sttr brew set up sttr
Snap
sudo snap set up sttr
Arch Linux
yay -S sttr-bin
Scoop
scoop bucket add sttr https://github.com/abhimanyu003/scoop-bucket.git scoop set up sttr
Go
go set up github.com/abhimanyu003/sttr@newest
Manually
Obtain the pre-compiled binaries from the Launch! web page and duplicate them to the specified location.
After set up merely run sttr command.
// For interactive menu sttr // Present your enter // Press two enter to open operation menu // Press `/` to filter numerous operations. // May also press UP-Down arrows choose numerous operations.
[x] slug – Rework your textual content to slug-case
[x] snake – Rework your textual content to snake_case
[x] title – Rework your textual content to Title Case
[x] higher – Rework your textual content to UPPER CASE
Traces
[x] count-lines – Rely the variety of traces in your textual content
[x] reverse-lines – Reverse traces
[x] shuffle-lines – Shuffle traces randomly
[x] sort-lines – Type traces alphabetically
[x] unique-lines – Get distinctive traces from listing
Areas
[x] remove-spaces – Take away all areas + new traces
[x] remove-newlines – Take away all new traces
Rely
[x] count-chars – Discover the size of your textual content (together with areas)
[x] count-lines – Rely the variety of traces in your textual content
[x] count-words – Rely the variety of phrases in your textual content
RGB/Hex
[x] hex-rgb – Convert a #hex-color code to RGB
[x] hex-encode – Encode your textual content Hex
[x] hex-decode – Convert Hexadecimal to String
JSON
[x] json – Format your textual content as JSON
[x] json-escape – JSON Escape
[x] json-unescape – JSON Unescape
[x] json-yaml – Convert JSON to YAML textual content
[x] json-msgpack – Convert JSON to MSGPACK
[x] msgpack-json – Convert MSGPACK to JSON
YAML
[x] yaml-json – Convert YAML to JSON textual content
Markdown
[x] markdown-html – Convert Markdown to HTML
Extract
[x] extract-emails – Extract emails from given textual content
[x] extract-ip – Extract IPv4 and IPv6 out of your textual content
[x] extract-urls – Extract URls your textual content ( we do not do ping verify )
Different
[x] escape-quotes – escape single and double quotes out of your textual content
[x] completion – generate the autocompletion script for the required shell
[x] interactive – Use sttr in interactive mode
[x] model – Print the model of sttr
[x] zeropad – Pad a quantity with zeros
[x] and including extra….
These are the few places the place sttr was highlighted, many due to all of you. Please be happy so as to add any blogs/movies you could have made that debate sttr to the listing.



")
")