{kind=link}

Human-robot collaboration focuses on creating clever methods working alongside people in dynamic environments. Researchers goal to construct robots able to understanding and executing pure language directions whereas adapting to constraints corresponding to spatial positioning, job sequencing, and capability-sharing between people and machines. This subject considerably advances robotics for family help, healthcare, and industrial automation, the place effectivity and flexibility are essential for seamless integration.
A serious problem in human-robot collaboration is the shortage of a complete benchmark to guage planning and reasoning talents in multi-agent duties. Whereas earlier fashions have addressed navigation and single-agent interactions, they fail to seize real-world complexities the place robots should coordinate with people. Many current approaches don’t account for real-time job monitoring, companion adaptation, and efficient error restoration. The absence of a longtime normal makes it tough to evaluate and enhance collaborative AI efficiency in interactive settings systematically.
Present approaches in embodied AI usually deal with single-agent job execution, disregarding the need of coordination in multi-agent situations. Some strategies depend on templated job directions, limiting scalability and job range, whereas others rely on manually crafted analysis capabilities, making large-scale assessments impractical. Regardless of developments, state-of-the-art massive language fashions (LLMs) battle with job monitoring, coordination, and restoration from execution failures. These limitations hinder their capacity to perform effectively in human-centric environments the place adaptability and exact job execution are important.
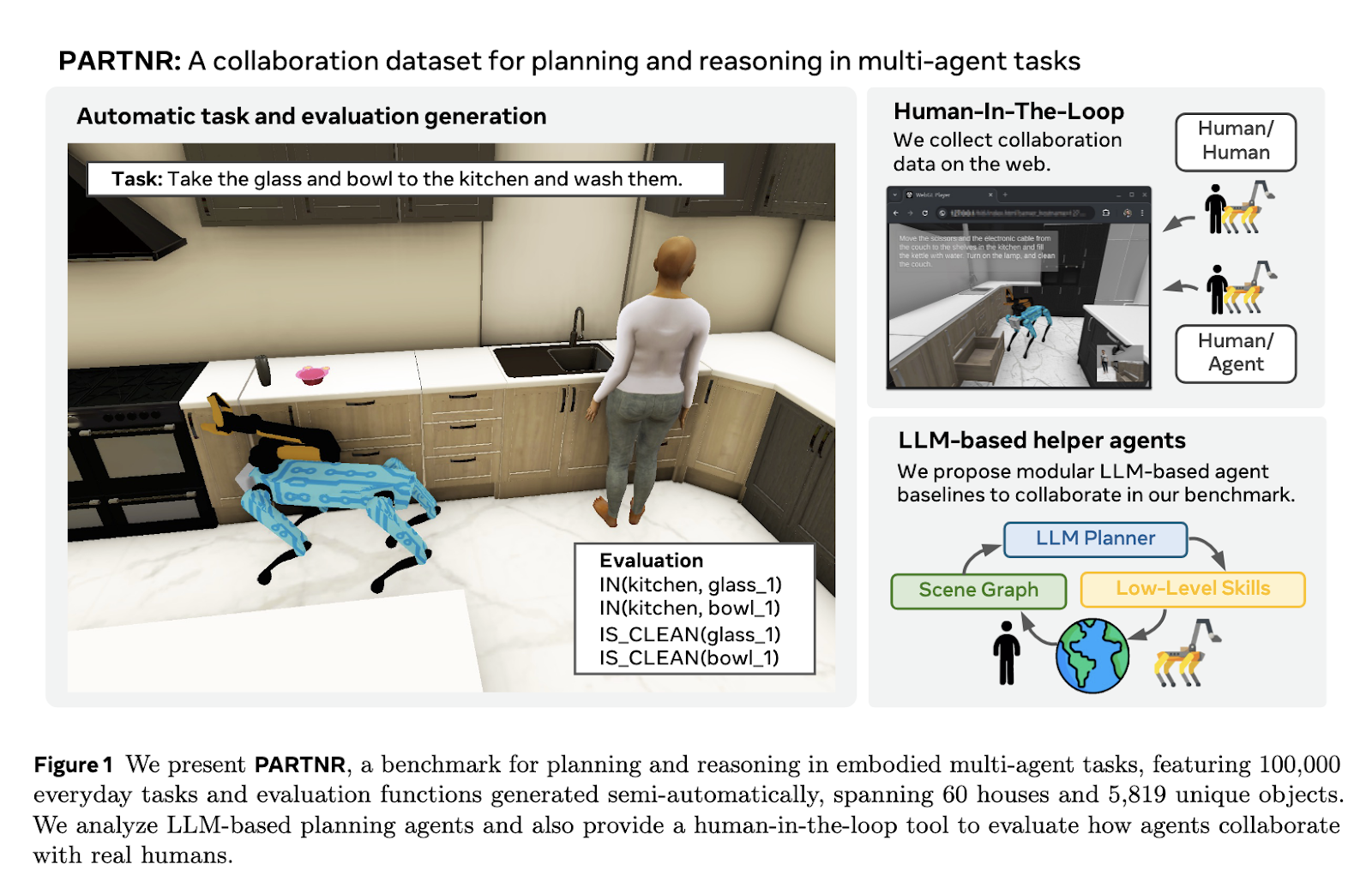
Researchers at FAIR Meta have launched PARTNR (Planning And Reasoning Duties in humaN-Robotic collaboration), a large-scale benchmark designed to evaluate human-robot coordination in simulated environments. PARTNR contains 100,000 pure language duties, spanning 60 simulated properties and 5,819 distinctive objects. The benchmark particularly evaluates duties incorporating spatial, temporal, and heterogeneous constraints. Researchers ensured a sensible and scalable job era course of by leveraging a semi-automated pipeline integrating LLMs and simulation-in-the-loop validation. PARTNR goals to set a normal for evaluating AI’s capacity to collaborate with human companions successfully.
Researchers generated job directions and analysis capabilities utilizing LLMs to create the benchmark. These have been then filtered via simulation to take away infeasible duties. The ultimate dataset underwent human-in-the-loop validation to reinforce job range and guarantee accuracy. The duties in PARTNR fall into 4 classes: constraint-free, spatial, temporal, and heterogeneous. Constraint-free duties enable flexibility in execution order, whereas spatial duties require particular object positioning. Temporal duties necessitate ordered execution, and heterogeneous duties contain actions past the robotic’s functionality, requiring human intervention. These job constructions introduce challenges in coordination, monitoring, and execution accuracy.
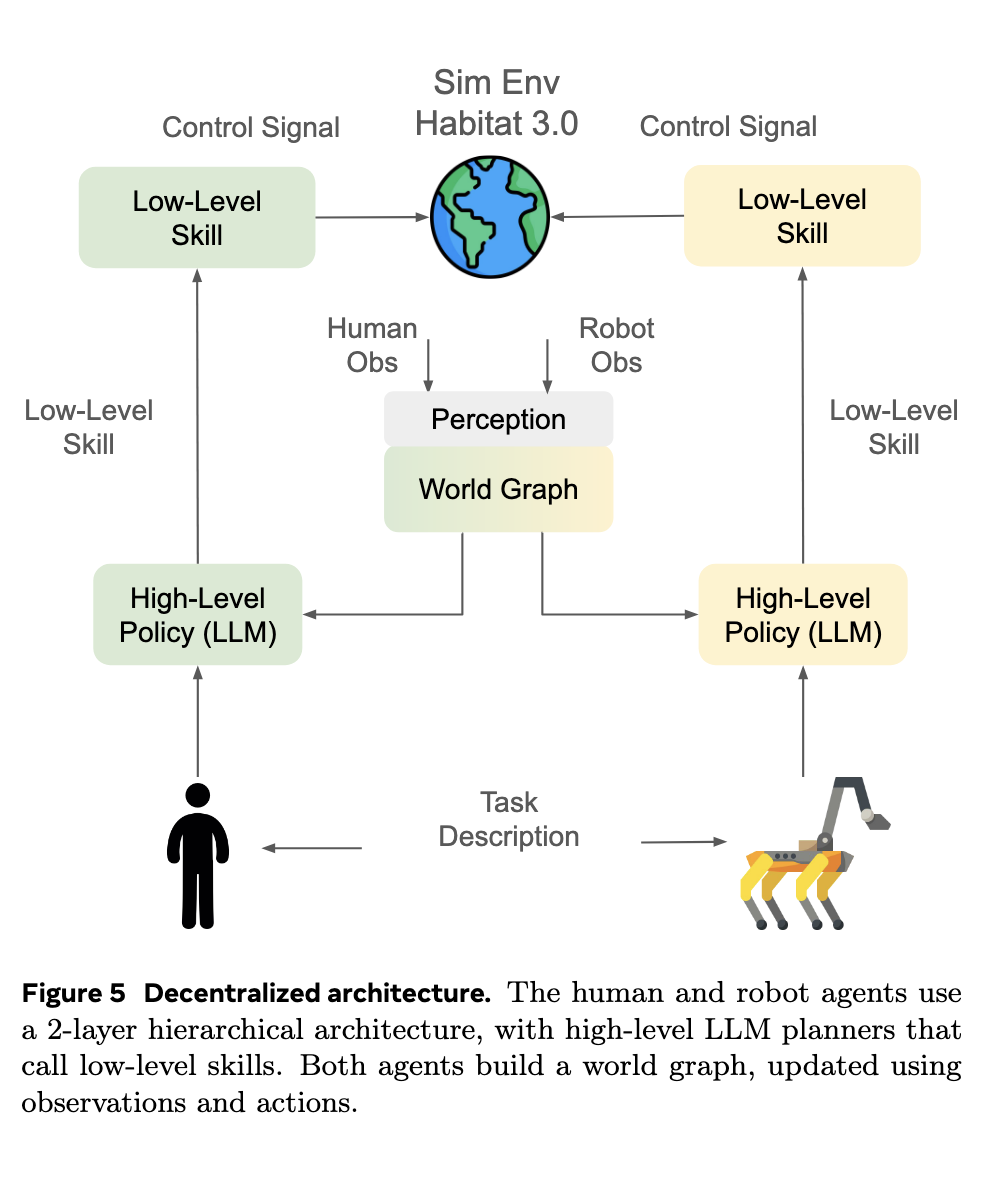
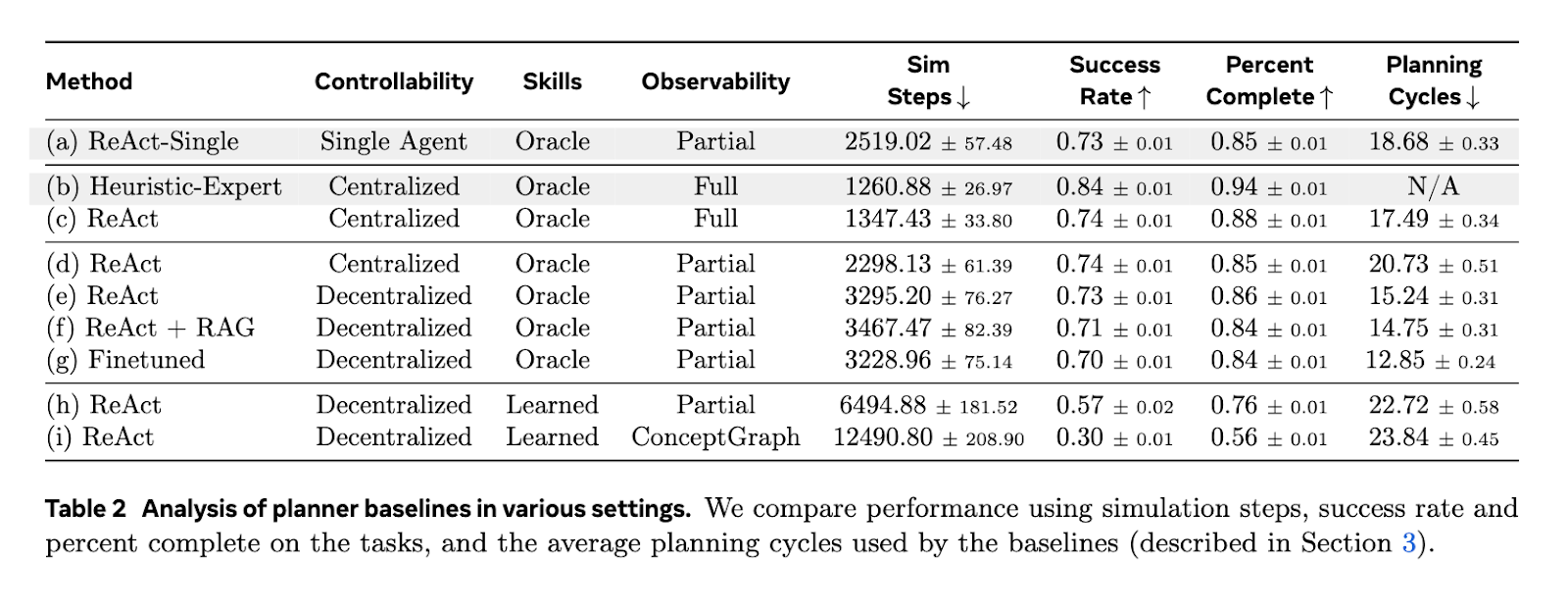
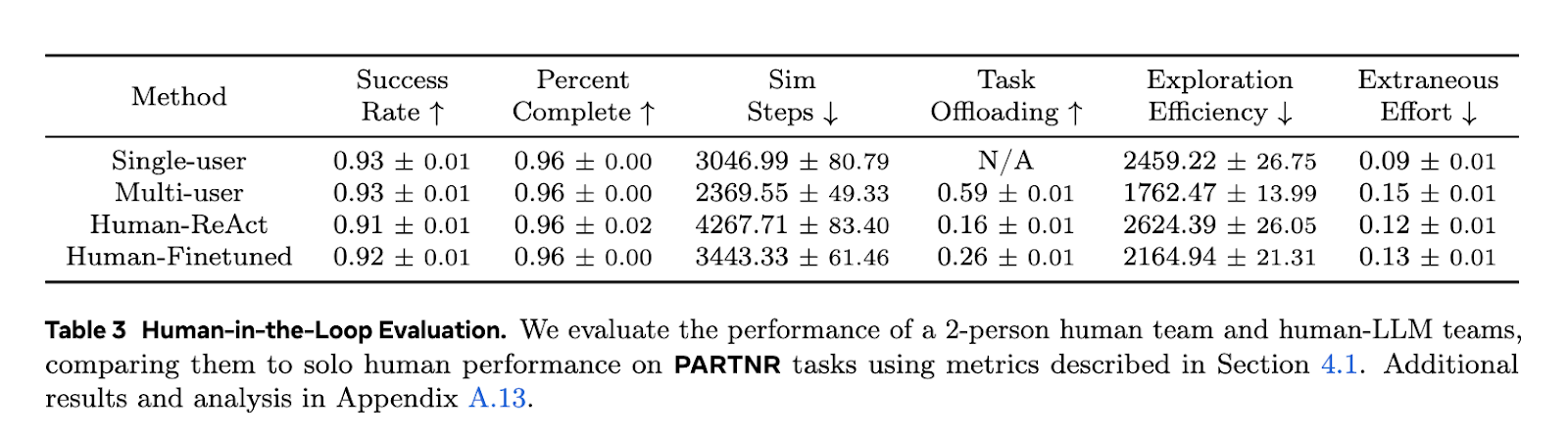
Evaluations of LLM-based planning brokers on PARTNR revealed important limitations in coordination, job monitoring, and error restoration. When paired with people, LLM-guided robots required 1.5 occasions extra steps than human-human groups and 1.1 occasions extra steps than a single human to finish duties. The success charge of state-of-the-art LLMs was solely 30% underneath non-privileged situations, in comparison with 93% when duties have been carried out solely by people. Furthermore, fine-tuning smaller LLMs achieved efficiency corresponding to fashions 9 occasions bigger whereas being 8.6 occasions quicker at inference. In decentralized multi-agent settings, job completion required 1.3 occasions extra steps than a single-agent situation, demonstrating inefficiencies in present coordination mechanisms.
PARTNR highlights essential gaps in current AI-driven human-robot collaboration fashions, emphasizing higher planning, monitoring, and decision-making methods. The findings point out that regardless of developments in AI, human-robot collaboration benchmarks require substantial enhancements to bridge the efficiency disparity between AI fashions and people. The structured analysis framework provided by PARTNR supplies a pathway for advancing AI’s capacity to collaborate, plan, and execute duties effectively. Future analysis ought to deal with refining LLM-based planners, bettering coordination mechanisms, and enhancing notion fashions to handle present limitations in multi-agent interplay. PARTNR is a invaluable useful resource for driving innovation in collaborative embodied AI methods.
Take a look at the Paper. All credit score for this analysis goes to the researchers of this mission. Additionally, don’t neglect to comply with us on Twitter and be part of our Telegram Channel and LinkedIn Group. Don’t Overlook to hitch our 75k+ ML SubReddit.
Nikhil is an intern marketing consultant at Marktechpost. He’s pursuing an built-in twin diploma in Supplies on the Indian Institute of Expertise, Kharagpur. Nikhil is an AI/ML fanatic who’s at all times researching functions in fields like biomaterials and biomedical science. With a powerful background in Materials Science, he’s exploring new developments and creating alternatives to contribute.