{kind=link}

Integrating superior predictive fashions into autonomous driving techniques has turn into essential for enhancing security and effectivity. Digital camera-based video prediction emerges as a pivotal part, providing wealthy real-world knowledge. Content material generated by synthetic intelligence is presently a number one space of examine throughout the domains of laptop imaginative and prescient and synthetic intelligence. Nevertheless, producing photo-realistic and coherent movies poses vital challenges resulting from restricted reminiscence and computation time. Furthermore, predicting video from a front-facing digicam is essential for superior driver-assistance techniques in autonomous automobiles.
Present approaches embrace diffusion-based architectures which have turn into in style for producing pictures and movies, with higher efficiency in duties comparable to picture era, enhancing, and translation. Different strategies like Generative Adversarial Networks (GANs), flow-based fashions, auto-regressive fashions, and Variational Autoencoders (VAEs) have additionally been used for video era and prediction. Denoising Diffusion Probabilistic Fashions (DDPMs) outperform conventional era fashions in effectiveness. Nevertheless, producing lengthy movies continues to be computationally demanding. Though autoregressive fashions like Phenaki sort out this subject, they typically face challenges with unrealistic scene transitions and inconsistencies in longer sequences.
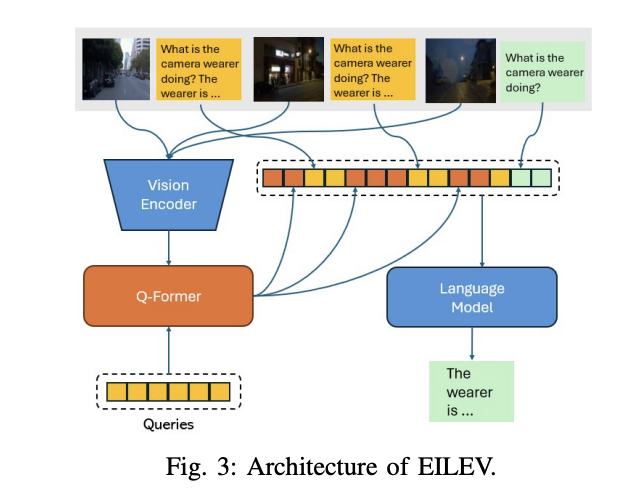
A workforce of researchers from Columbia College in New York have proposed the DriveGenVLM framework to generate driving movies and used Imaginative and prescient Language Fashions (VLMs) to know them. The framework makes use of a video era strategy primarily based on denoising diffusion probabilistic fashions (DDPM) to foretell real-world video sequences. A pre-trained mannequin referred to as Environment friendly In-context Studying on Selfish Movies (EILEV) is utilized to judge the adequacy of generated movies for VLMs. EILEV additionally offers narrations for these generated movies, doubtlessly enhancing visitors scene understanding, aiding navigation, and enhancing planning capabilities in autonomous driving.
The DriveGenVLM framework is validated utilizing the Waymo Open Dataset, which offers various real-world driving situations from a number of cities. The dataset is cut up into 108 movies for coaching and divided equally among the many three cameras, and 30 movies for testing (10 per digicam). This framework makes use of the Frechet Video Distance (FVD) metric to judge the standard of generated movies, the place FVD measures the similarity between the distributions of generated and actual movies. This metric is efficacious for temporal coherence and visible high quality analysis, making it an efficient instrument for benchmarking video synthesis fashions in duties comparable to video era and future body prediction.
The outcomes for the DriveGenVLM framework on the Waymo Open Dataset for 3 cameras reveal that the adaptive hierarchy-2 sampling technique outperforms different sampling schemes by yielding the bottom FVD scores. Prediction movies are generated for every digicam utilizing this superior sampling technique, the place every instance is conditioned on the primary 40 frames, with floor reality frames and predicted frames. Furthermore, the versatile diffusion mannequin’s coaching on the Waymo dataset reveals its capability for producing coherent and photorealistic movies. Nevertheless, it nonetheless faces challenges in precisely deciphering advanced real-world driving situations, comparable to navigating visitors and pedestrians.

In conclusion, researchers from Columbia College have launched the DriveGenVLM framework to generate driving movies. The DDPM educated on the Waymo dataset is proficient whereas producing coherent and lifelike pictures from entrance and aspect cameras. Furthermore, the pre-trained EILEV mannequin is used to generate motion narrations for the movies. The DriveGenVLM framework highlights the potential of integrating generative fashions and VLMs for autonomous driving duties. Sooner or later, the generated descriptions of driving situations can be utilized in giant language fashions to supply driver help or assist language model-based algorithms.
Take a look at the Paper. All credit score for this analysis goes to the researchers of this mission. Additionally, don’t neglect to observe us on Twitter and LinkedIn. Be a part of our Telegram Channel.
For those who like our work, you’ll love our e-newsletter..
Don’t Overlook to affix our 50k+ ML SubReddit

Sajjad Ansari is a ultimate yr undergraduate from IIT Kharagpur. As a Tech fanatic, he delves into the sensible purposes of AI with a give attention to understanding the impression of AI applied sciences and their real-world implications. He goals to articulate advanced AI ideas in a transparent and accessible method.