{kind=link}

Imitation studying (IL) is without doubt one of the strategies in robotics the place robots are skilled to imitate human actions based mostly on skilled demonstrations. This technique depends on supervised machine studying and requires vital human-generated knowledge to information the robotic’s habits. Though efficient for advanced duties, imitation studying is proscribed by the dearth of large-scale datasets and challenges in scaling knowledge assortment, in contrast to language and imaginative and prescient fashions. Studying from human video demonstrations faces huge challenges as a result of robots can’t match the sensitivity and adaptability of human palms. These variations make it exhausting for imitation studying to work successfully or scale up for basic robotic duties.
Conventional imitation studying (IL) relied on human-operated robots, which had been efficient however confronted vital limitations. These techniques are based mostly on teleoperation by way of gloves, movement seize, and VR gadgets and depend on advanced setups and the low-latency management loop. Additionally they relied on bodily robots and special-purpose {hardware}, which was troublesome to scale. Though robots might carry out duties similar to inserting batteries or tying shoelaces utilizing skilled knowledge collected by these approaches, the necessity for particular tools made such approaches impractical for large-scale or extra basic use.
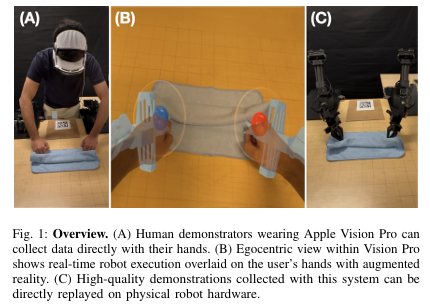
To resolve this, a bunch of researchers from Apple and the College of Colorado Boulder proposed the ARMADA system, which integrates the Apple Imaginative and prescient Professional headset with exterior robotic management utilizing a mixture of ROS and WebSockets. This setup let communication between the gadgets, the place the system could possibly be plug-and-play and was versatile to many robotic platforms, similar to Franka and UR5, by solely changing 3D mannequin information and knowledge formatting for the headset. The ARMADA app dealt with robotic visualization, knowledge storage, and a person interface, receiving transformation frames for robotic hyperlinks, capturing picture frames from cameras, and monitoring human skeleton knowledge for processing. The robotic node managed management, knowledge storage, and constraint calculation, remodeling skeletal knowledge into robotic instructions and detecting workspace violations, singularities, and pace points for real-time suggestions.

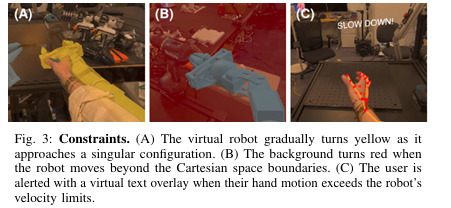
The robotic’s actions had been aligned with human wrist and finger positions, tracked by way of ARKit in imaginative and prescient 2.0, utilizing inverse kinematics to calculate joint positions and management a gripper based mostly on finger spacing. Constraints like singularity, workspace limits, and pace violations had been visualized by way of colour modifications, digital boundaries, or on-screen textual content. Researchers used the ARMADA system to carry out three duties: choosing a tissue from a field, putting a toy right into a cardboard field, and wiping a desk with each palms. Every job had 5 beginning states, and success was based mostly on particular standards. Sporting Apple Imaginative and prescient Professional with ARMADA software program on visionOS 2.0, members supplied 45 demonstrations below three suggestions situations: No Suggestions, Suggestions, and Publish Suggestions. Wrist and finger actions had been tracked in real-time utilizing ARKit, and robotic actions had been managed by way of inverse kinematics, with joint trajectories recorded for replay.
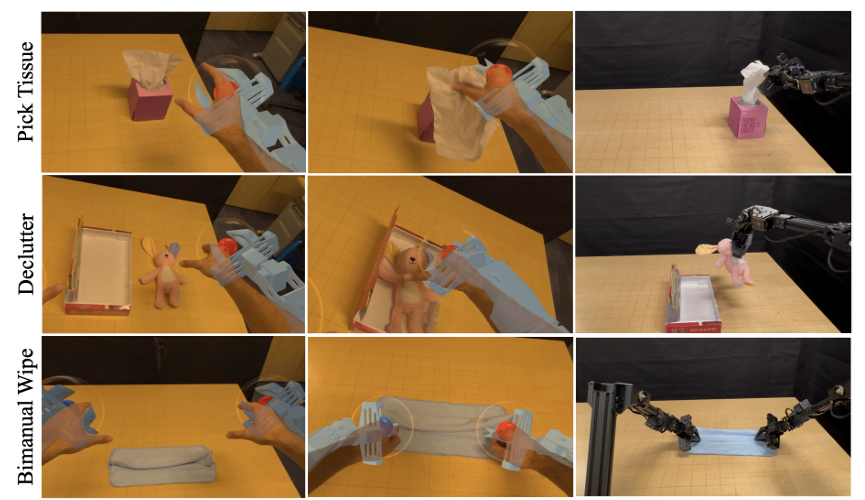
Upon analysis, the outcomes confirmed that suggestions visualization considerably improved replay success charges for duties like Decide Tissue, Declutter, and Bimanual Wipe, with features of as much as 85% in comparison with no suggestions. Publish-feedback demonstrations additionally confirmed enhancements however had been much less efficient than real-time suggestions. Individuals discovered the suggestions intuitive and helpful for understanding robotic movement, and the system labored effectively for customers with various expertise ranges. Frequent failure modes with out suggestions included imprecise robotic poses and gripper points. Individuals adjusted their habits throughout demonstrations, slowing down and altering hand positions, and will visualize suggestions after eradicating it.
In abstract, the proposed ARMADA system addressed the problem of scalable knowledge assortment for robotic imitation studying through the use of augmented actuality for real-time suggestions to enhance knowledge high quality and compatibility with bodily robots. The outcomes confirmed the significance of suggestions for aligning robot-free demonstrations with actual robotic kinematics. Whereas the examine targeted on easier duties, future analysis can discover extra advanced ones and refine strategies. This technique can function a baseline for future robotics analysis, notably in coaching robotic management insurance policies by way of imitation studying with visible observations.
Take a look at the Paper. All credit score for this analysis goes to the researchers of this mission. Additionally, don’t overlook to comply with us on Twitter and be part of our Telegram Channel and LinkedIn Group. Don’t Neglect to affix our 60k+ ML SubReddit.
Divyesh is a consulting intern at Marktechpost. He’s pursuing a BTech in Agricultural and Meals Engineering from the Indian Institute of Expertise, Kharagpur. He’s a Information Science and Machine studying fanatic who desires to combine these main applied sciences into the agricultural area and remedy challenges.