{kind=link}


MIT researchers developed an AI method that permits a robotic to develop advanced plans for manipulating an object utilizing its whole hand, not simply the fingertips. This mannequin can generate efficient plans in a few minute utilizing a regular laptop computer. Right here, a robotic makes an attempt to rotate a bucket 180 levels. Picture: Courtesy of the researchers
By Adam Zewe | MIT Information
Think about you wish to carry a big, heavy field up a flight of stairs. You may unfold your fingers out and carry that field with each fingers, then maintain it on high of your forearms and steadiness it towards your chest, utilizing your entire physique to control the field.
People are usually good at whole-body manipulation, however robots wrestle with such duties. To the robotic, every spot the place the field might contact any level on the provider’s fingers, arms, and torso represents a contact occasion that it should motive about. With billions of potential contact occasions, planning for this activity shortly turns into intractable.
Now MIT researchers discovered a technique to simplify this course of, generally known as contact-rich manipulation planning. They use an AI method known as smoothing, which summarizes many contact occasions right into a smaller variety of selections, to allow even a easy algorithm to shortly establish an efficient manipulation plan for the robotic.
Whereas nonetheless in its early days, this methodology might probably allow factories to make use of smaller, cell robots that may manipulate objects with their whole arms or our bodies, fairly than massive robotic arms that may solely grasp utilizing fingertips. This may increasingly assist scale back vitality consumption and drive down prices. As well as, this system might be helpful in robots despatched on exploration missions to Mars or different photo voltaic system our bodies, since they may adapt to the setting shortly utilizing solely an onboard laptop.
“Slightly than enthusiastic about this as a black-box system, if we will leverage the construction of those sorts of robotic techniques utilizing fashions, there is a chance to speed up the entire process of making an attempt to make these selections and give you contact-rich plans,” says H.J. Terry Suh, {an electrical} engineering and laptop science (EECS) graduate pupil and co-lead creator of a paper on this system.
Becoming a member of Suh on the paper are co-lead creator Tao Pang PhD ’23, a roboticist at Boston Dynamics AI Institute; Lujie Yang, an EECS graduate pupil; and senior creator Russ Tedrake, the Toyota Professor of EECS, Aeronautics and Astronautics, and Mechanical Engineering, and a member of the Pc Science and Synthetic Intelligence Laboratory (CSAIL). The analysis seems this week in IEEE Transactions on Robotics.
Studying about studying
Reinforcement studying is a machine-learning method the place an agent, like a robotic, learns to finish a activity by means of trial and error with a reward for getting nearer to a objective. Researchers say one of these studying takes a black-box method as a result of the system should study all the things concerning the world by means of trial and error.
It has been used successfully for contact-rich manipulation planning, the place the robotic seeks to study one of the simplest ways to maneuver an object in a specified method.
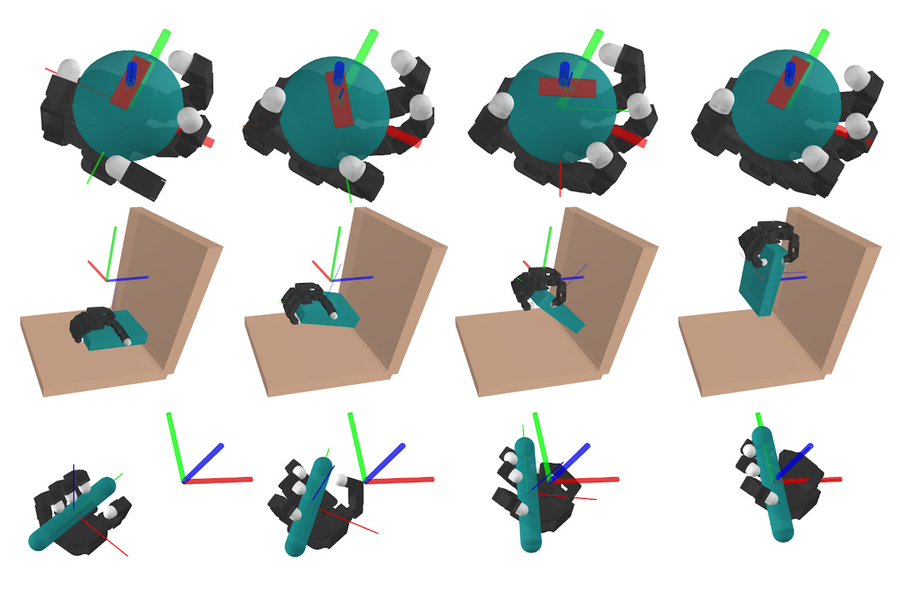
In these figures, a simulated robotic performs three contact-rich manipulation duties: in-hand manipulation of a ball, selecting up a plate, and manipulating a pen into a selected orientation. Picture: Courtesy of the researchers
However as a result of there could also be billions of potential contact factors {that a} robotic should motive about when figuring out how you can use its fingers, fingers, arms, and physique to work together with an object, this trial-and-error method requires an excessive amount of computation.
“Reinforcement studying could have to undergo thousands and thousands of years in simulation time to truly be capable to study a coverage,” Suh provides.
Then again, if researchers particularly design a physics-based mannequin utilizing their information of the system and the duty they need the robotic to perform, that mannequin incorporates construction about this world that makes it extra environment friendly.
But physics-based approaches aren’t as efficient as reinforcement studying in the case of contact-rich manipulation planning — Suh and Pang puzzled why.
They carried out an in depth evaluation and located {that a} method generally known as smoothing allows reinforcement studying to carry out so nicely.
Lots of the selections a robotic might make when figuring out how you can manipulate an object aren’t necessary within the grand scheme of issues. As an example, every infinitesimal adjustment of 1 finger, whether or not or not it ends in contact with the article, doesn’t matter very a lot. Smoothing averages away a lot of these unimportant, intermediate selections, leaving just a few necessary ones.
Reinforcement studying performs smoothing implicitly by making an attempt many contact factors after which computing a weighted common of the outcomes. Drawing on this perception, the MIT researchers designed a easy mannequin that performs an identical kind of smoothing, enabling it to concentrate on core robot-object interactions and predict long-term habits. They confirmed that this method might be simply as efficient as reinforcement studying at producing advanced plans.
“If you realize a bit extra about your downside, you possibly can design extra environment friendly algorithms,” Pang says.
A profitable mixture
Though smoothing enormously simplifies the choices, looking out by means of the remaining selections can nonetheless be a tough downside. So, the researchers mixed their mannequin with an algorithm that may quickly and effectively search by means of all potential selections the robotic might make.
With this mix, the computation time was minimize right down to a few minute on a regular laptop computer.
They first examined their method in simulations the place robotic fingers got duties like shifting a pen to a desired configuration, opening a door, or selecting up a plate. In every occasion, their model-based method achieved the identical efficiency as reinforcement studying, however in a fraction of the time. They noticed comparable outcomes after they examined their mannequin in {hardware} on actual robotic arms.
“The identical concepts that allow whole-body manipulation additionally work for planning with dexterous, human-like fingers. Beforehand, most researchers mentioned that reinforcement studying was the one method that scaled to dexterous fingers, however Terry and Tao confirmed that by taking this key concept of (randomized) smoothing from reinforcement studying, they will make extra conventional planning strategies work extraordinarily nicely, too,” Tedrake says.
Nevertheless, the mannequin they developed depends on an easier approximation of the true world, so it can’t deal with very dynamic motions, corresponding to objects falling. Whereas efficient for slower manipulation duties, their method can’t create a plan that will allow a robotic to toss a can right into a trash bin, as an illustration. Sooner or later, the researchers plan to reinforce their method so it might deal with these extremely dynamic motions.
“In the event you examine your fashions fastidiously and actually perceive the issue you are attempting to unravel, there are positively some beneficial properties you possibly can obtain. There are advantages to doing issues which can be past the black field,” Suh says.
This work is funded, partly, by Amazon, MIT Lincoln Laboratory, the Nationwide Science Basis, and the Ocado Group.

MIT Information